Week 7: Programming a Line Following Robot with...
Read MoreLine follower robot car
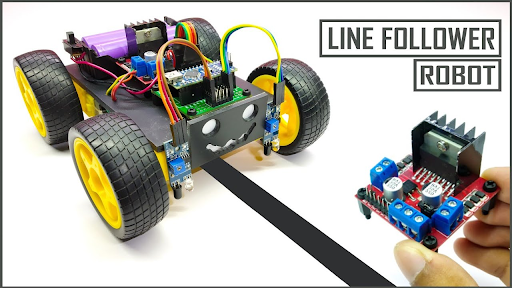
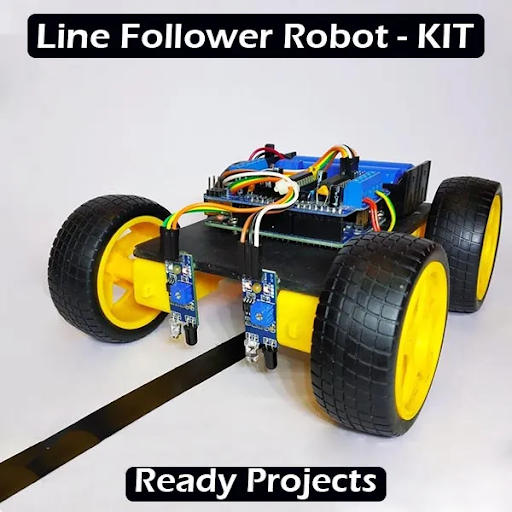
The goal of this project is to enable students to build a Line Follower Robot using Arduino and infrared sensors, where the robot autonomously follows a predefined path. This project introduces students to the principles of sensor-based navigation and control systems used in robotics. Line-following robots are a fundamental concept in autonomous vehicles, warehouses, and industrial automation, where precise path tracking is essential.
By completing this project, students will gain hands-on experience with sensors, motor control, and decision-making algorithms. This will help them understand how these technologies are applied in real-world systems such as self-driving cars, conveyor systems, and automated guided vehicles (AGVs) in manufacturing and logistics.
Line Follower Robot 6
Week 6: Controlling Robot Motors with IR Sensor...
Read MoreLine Follower Robot 5
Week 5: Programming 2 or 4 Motors with...
Read MoreLine Follower Robot 4
Week 4: Programming 1 Motor to Drive Forward...
Read More